�ŷ�늙C(j��)���a����λ�c�D(zhu��n)�ӴŘO��λ���c(di��n)��Ό�(du��)�R�Ć�(w��n)�}
���Ž����ŷ�늙C(j��)�ľ��a����λ���Ҫ�c�D(zhu��n)�ӴŘO��λ��(du��)�R
��ΨһĿ�ľ���Ҫ�_(d��)��ʸ�����Ƶ�Ŀ��(bi��o)��ʹd�S��(l��)�ŷ�����q�S����������������Ž����ŷ�늙C(j��)�����@�M�a(ch��n)����늴ň�(ch��ng)ʼ�K�������D(zhu��n)�����ň�(ch��ng)���Ķ��@����ѵij���Ч���������ֱ�����ԡ����@�N���Ʒ���Ҳ���Q��ň�(ch��ng)������ƣ�FOC�����_(d��)��FOC����Ŀ��(bi��o)�����ڱ��F(xi��n)�������Ž����ŷ�늙C(j��)�ġ������������ʼ�K�c���෴늄�(sh��)�����α���һ�£����D��ʾ��
��˷��ƿ�֪��ֻҪ���k�������Ž����ŷ�늙C(j��)�ġ������������ʼ�K�c���෴늄�(sh��)�����α���һ�£��Ϳ����_(d��)��FOC����Ŀ��(bi��o)��ʹ���Ž����ŷ�늙C(j��)�ij���(j��)늴ň�(ch��ng)�c�ŘO���ň�(ch��ng)�������������g����90��늽Ƕȣ����D��ʾ��
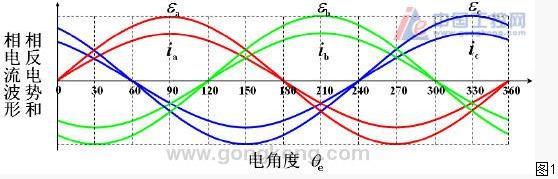
������k��ʹ���Ž����ŷ�늙C(j��)�ġ������������ʼ�K�c���෴늄�(sh��)�����α���һ���أ��ɈD1��֪��ֻҪ�܉��S�r(sh��)�z�y(c��)�������ͷ�늄�(sh��)���ε�늽Ƕ���λ��Ȼ��Ϳ�������(du��)���ظ���(j��)����λ�����c��늄�(sh��)����һ�µ�����������������ˣ������λ��(du��)�R�Ϳ����D(zhu��n)���龎�a����λ�c��늄�(sh��)������λ�Č�(du��)�R�P(gu��n)ϵ��
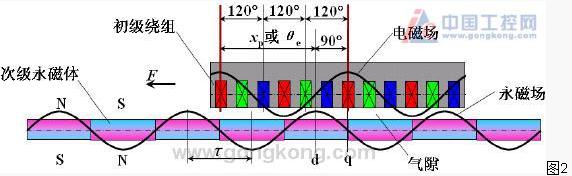
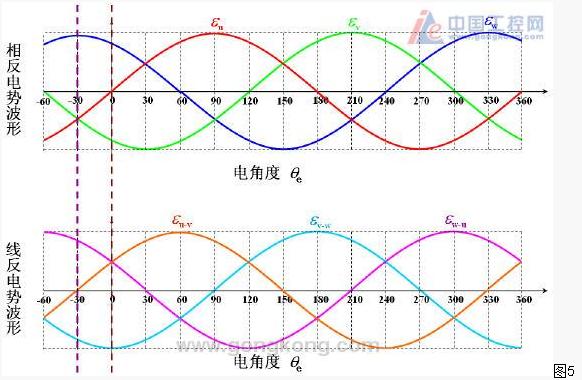
�ڌ�(sh��)�H�����У��W���S����(x��)�T�ڲ��ýo늙C(j��)���@�Mͨ��С���~�������ֱ�����ʹ늙C(j��)�D(zhu��n)�Ӷ���ķ�����(l��i)��(du��)�R���a�����D(zhu��n)�ӴŘO����λ����(d��ng)늙C(j��)���@�Mͨ��С���~�������ֱ������r(sh��)���ڟo(w��)�����l���£�����(j��)늴ň�(ch��ng)�c�ŘO���ň�(ch��ng)����ã���(hu��)���������λ������0����λ��ƽ��λ���ϣ����D��ʾ��
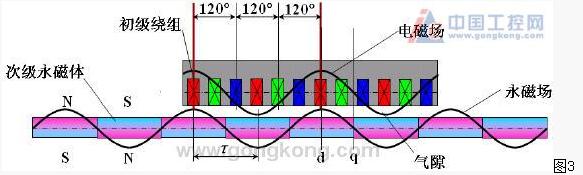
��(du��)������ĈD3�͈D2��Ҋ(ji��n)���mȻU���@�M���tɫ����λ��ͬ̎��늴ň�(ch��ng)���εķ�ֵ���ģ��ض��Ƕȣ�����FOC�����£�U�������c�����w��q�S��(du��)�R�������d����r(sh��)��U�����ąs�cd�S��(du��)�R��Ҳ�͌�(sh��)�F(xi��n)��a�S����S�cd�S�g�Č�(du��)�R�P(gu��n)ϵ���˕r(sh��)��λ��(du��)�R��늽Ƕ�0�ȣ�늙C(j��)�@�M��ʩ�ӵ��D(zhu��n)�Ӷ�������ķ���?y��n)�U���룬VW��������V���cW���Dz�(li��n)�P(gu��n)ϵ������(j��ng)V���W�������п��ܳ��F(xi��n)��ƽ�⣬�Ķ�Ӱ��D(zhu��n)�Ӷ���Ĝ�(zh��n)�_�ԡ�
��(sh��)�û����D(zhu��n)�Ӷ������ʩ�ӷ�����U�룬V������U���cV�മ(li��n)���ɫ@�÷�ֵ��ȫһ�µ�U���V������������ڶ���Ĝ�(zh��n)�_�ԣ��˕r(sh��)U���@�M���tɫ����λ���cd�S��30��늽Ƕȣ���a�S����S��(du��)�R���cd�ؓ(f��)��30�ȵ�늽Ƕ�λ���ϣ���D��ʾ
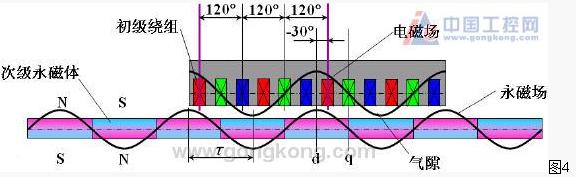
�����ɷN�D(zhu��n)�Ӷ�����(du��)��(y��ng)���@�M�෴늄�(sh��)���κ;���늄�(sh��)���Լ�늽Ƕȵ��P(gu��n)ϵ���D��ʾ����ɫ����a�S����S�cd�S��(du��)�R����ֱ�ӌ�(du��)�R��늽Ƕ�0�c(di��n)����ɫ����a�S����S��(du��)�R���cd�ؓ(f��)��30�ȵ�늽Ƕ�λ�ã�����(du��)�R��-30��늽Ƕ��c(di��n)��
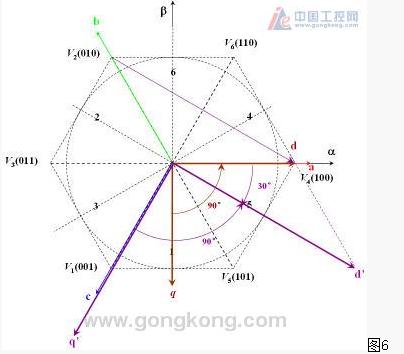
d��q�Sʸ���ca��b��c�S��������S֮�g�ĽǶȵ��P(gu��n)ϵ���D��ʾ����ɫ��d�S�ca�S����S��(du��)�R����ֱ�ӌ�(du��)�R��늽Ƕ�0�c(di��n)����ɫ����d���S�ca�S����S���30�ȣ�����(du��)�R��-30��늽Ƕ��c(di��n)��
 ����ʽ���a������λ��(du��)�R��ʽ
����ʽ���a������λ��(du��)�R��ʽ �ڴ�ӑՓ�У�����ʽ���a����ݔ����̖(h��o)�鷽����̖(h��o)���ֿ��Է֞鎧�Q����̖(h��o)������ʽ���a������ͨ������ʽ���a������ͨ������ʽ���a���߂�������������}�_ݔ����̖(h��o)A��B���Լ���λ��̖(h��o)Z�����Q����̖(h��o)������ʽ���a�����߂�ABZݔ����̖(h��o)�⣬߀�߂以��120�ȵ���ӓQ����̖(h��o)UVW��UVW���Ե�ÿ�D(zhu��n)���ڔ�(sh��)�c늙C(j��)�D(zhu��n)�ӵĴŘO��(du��)��(sh��)һ�¡����Q����̖(h��o)������ʽ���a����UVW��ӓQ����̖(h��o)����λ�c�D(zhu��n)�ӴŘO��λ����Ի늽Ƕ���λ֮�g�Č�(du��)�R�������£�
1.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
2.��ʾ�����^�쾎�a����U����̖(h��o)��Z��̖(h��o)��
3.�{(di��o)�����a���D(zhu��n)�S�c늙C(j��)�S������(du��)λ�ã�
4.һ߅�{(di��o)����һ߅�^�쾎�a��U����̖(h��o)��׃�أ���Z��̖(h��o)��ֱ��Z��̖(h��o)��(w��n)���ڸ��ƽ�ϣ��ڴ�Ĭ�J(r��n)Z��̖(h��o)�ij��B(t��i)����ƽ�����i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ��
5.��(l��i)��Ť�D(zhu��n)늙C(j��)�S�����ֺ���늙C(j��)�Sÿ�����ɻ؏�(f��)��ƽ��λ�Õr(sh��)��Z��̖(h��o)���ܷ�(w��n)���ڸ��ƽ�ϣ��t��(du��)�R��Ч��
����ֱ���Դ���(y��n)�C���£�
1.��ʾ�����^�쾎�a����U����̖(h��o)��늙C(j��)��UV����늄�(sh��)���Σ�
2.�D(zhu��n)��(d��ng)늙C(j��)�S�����a����U����̖(h��o)�������c늙C(j��)��UV����늄�(sh��)�����ɵ͵��ߵ��^(gu��)���c(di��n)�غϣ����a����Z��̖(h��o)Ҳ���F(xi��n)���@��(g��)�^(gu��)���c(di��n)�ϡ�
�����(y��n)�C������Ҳ����������(du��)�R������
��Ҫע����ǣ��˕r(sh��)����ʽ���a����U����̖(h��o)����λ���c(di��n)���c늙C(j��)UV����늄�(sh��)����λ���c(di��n)��(du��)�R������늙C(j��)��U�෴늄�(sh��)���cUV����늄�(sh��)֮�g���30�ȣ�����@�ӌ�(du��)�R������ʽ���a����U����̖(h��o)����λ���c(di��n)�c늙C(j��)U�෴늄�(sh��)��-30����λ�c(di��n)��(du��)�R����늙C(j��)늽Ƕ���λ�cU�෴늄�(sh��)���ε���λһ�£����Դ˕r(sh��)����ʽ���a����U����̖(h��o)����λ���c(di��n)�c늙C(j��)늽Ƕ���λ��-30���c(di��n)��(du��)�R��
��Щ�ŷ���I(y��)��(x��)�T�ڌ����a����U����̖(h��o)���c(di��n)�c늙C(j��)늽Ƕȵ����c(di��n)ֱ�ӌ�(du��)�R�����_(d��)����Ŀ�ģ����ԣ�
1.��3��(g��)��ֵ��ȵ����ӳ����ͣ�Ȼ�������B�ӵ�3��(g��)���քe����늙C(j��)��UVW�����@�M������
2.��ʾ�����^��늙C(j��)U��ݔ���c�����������c(di��n)���Ϳ��Խ��Ƶõ�늙C(j��)��U�෴늄�(sh��)���Σ�
3.����(j��)�����ķ���̶ȣ��{(di��o)�����a���D(zhu��n)�S�c늙C(j��)�S������(du��)λ�ã����߾��a���⚤�c늙C(j��)�⚤������(du��)λ�ã�
4.һ߅�{(di��o)����һ߅�^�쾎�a����U����̖(h��o)�����غ�늙C(j��)U�෴늄�(sh��)�����ɵ͵��ߵ��^(gu��)���c(di��n)����Kʹ�����غ��^(gu��)���c(di��n)�غϣ��i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ����Ɍ�(du��)�R��
������ͨ����ʽ���a�����߂�UVW��λ��Ϣ����Z��̖(h��o)Ҳֻ�ܷ�ӳһȦ��(n��i)��һ��(g��)�c(di��n)λ�����߂�ֱ�ӵ���λ��(du��)�R��������������鱾ӑՓ��Ԓ�}��
�^��(du��)ʽ���a������λ��(du��)�R��ʽ �^��(du��)ʽ���a������λ��(du��)�R��(du��)�چ�Ȧ�Ͷ�Ȧ���ԣ���e�����䌍(sh��)������һȦ��(n��i)��(du��)�R���a���ęz�y(c��)��λ�c늙C(j��)늽Ƕȵ���λ�����ڵĽ^��(du��)ʽ���a����(hu��)�ԆΪ�(d��)�����_�o����Ȧ��λ�����λ���ƽ�����ô��ƽ��0��1�ķ��D(zhu��n)��Ҳ���Ԍ�(sh��)�F(xi��n)���a����늙C(j��)����λ��(du��)�R���������£�
1.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
2.��ʾ�����^��^��(du��)���a�������Ӌ(j��)��(sh��)λ�ƽ��̖(h��o)��
3.�{(di��o)�����a���D(zhu��n)�S�c늙C(j��)�S������(du��)λ�ã�
4.һ߅�{(di��o)����һ߅�^�����Ӌ(j��)��(sh��)λ��̖(h��o)����׃�أ�ֱ����׃��(zh��n)�_���F(xi��n)��늙C(j��)�S�Ķ���ƽ��λ��̎���i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ��
5.��(l��i)��Ť�D(zhu��n)늙C(j��)�S�����ֺ���늙C(j��)�Sÿ�����ɻ؏�(f��)��ƽ��λ�Õr(sh��)����׃�ض��ܜ�(zh��n)�_��(f��)�F(xi��n)���t��(du��)�R��Ч��
�@^��(du��)ʽ���a��Ŀǰ�ѽ�(j��ng)������EnDAT��BiSS��Hyperface�ȴ��Ѕf(xi��)�h���Լ���ϵ���ô��Ѕf(xi��)�h�����ͽ^��(du��)ʽ���a���V��ȡ����������λ��̖(h��o)�Ͳ��������ˣ��˕r(sh��)��(du��)�R���a����늙C(j��)��λ�ķ���Ҳ����׃��������һ�N�dz���(sh��)�õķ��������þ��a����(n��i)����EEPROM���惦(ch��)���a���S�C(j��)���b��늙C(j��)�S�Ϻ�(sh��)�y(c��)����λ�����w�������£�
1.�����a���S�C(j��)���b��늙C(j��)�ϣ����̽Y(ji��)���a���D(zhu��n)�S�c늙C(j��)�S���Լ����a���⚤�c늙C(j��)�⚤��
2.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
3.���ŷ��(q��)��(d��ng)���xȡ�^��(du��)���a���Ć�Ȧλ��ֵ�������뾎�a����(n��i)��ӛ�늙C(j��)늽Ƕȳ�ʼ��λ��EEPROM�У�
4.��(du��)�R�^(gu��)�̽Y(ji��)����
���ڴ˕r(sh��)늙C(j��)�S�Ѷ�����늽Ƕ���λ��-30�ȷ�����˴���ľ��a����(n��i)��EEPROM�е�λ�Ùz�y(c��)ֵ�͌�(du��)��(y��ng)늙C(j��)늽Ƕȵ�-30����λ���˺��(q��)��(d��ng)��������r(sh��)�̵Ć�Ȧλ�Ùz�y(c��)��(sh��)��(j��)�c�@��(g��)�惦(ch��)ֵ���������(j��)늙C(j��)�O��(du��)��(sh��)�M(j��n)�б�Ҫ�ēQ�㣬�ټ���-30�ȣ��Ϳ��Եõ�ԓ�r(sh��)�̵�늙C(j��)늽Ƕ���λ��
�@�N��(du��)�R��ʽ��Ҫ���a�����ŷ��(q��)��(d��ng)����֧�ֺ���Ϸ��܌�(sh��)�F(xi��n)����ϵ�ŷ��ľ��a����λ֮���Բ�������K�Ñ�ֱ���{(di��o)���ĸ���ԭ������ڲ������Ñ��ṩ�@�N��(du��)�R��ʽ�Ĺ��ܽ���Ͳ����������@�N��(du��)�R������һ���̎�ǣ�ֻ����늙C(j��)�@�M�ṩ�_������ͷ�����D(zhu��n)�Ӷ���������o(w��)���{(di��o)�����a����늙C(j��)�S֮�g�ĽǶ��P(gu��n)ϵ��������a�������������ʼ�Ƕ�ֱ�Ӱ��b��늙C(j��)�ϣ��ҟo(w��)�辫��(x��)��������(ji��n)�ε��{(di��o)���^(gu��)�̣�������(ji��n)�Σ���ˇ�Ժá�
����^��(du��)ʽ���a���ț](m��i)�пɹ�ʹ�õ�EEPROM���֛](m��i)�пɹ��z�y(c��)�����Ӌ(j��)��(sh��)λ���_���t��(du��)�R������(hu��)����(du��)��(f��)�s������(q��)��(d��ng)��֧�ֆ�Ȧ�^��(du��)λ����Ϣ���x�����@ʾ���t���Կ��]��
1.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
2.�����ŷ��(q��)��(d��ng)���xȡ���@ʾ�^��(du��)���a���Ć�Ȧλ��ֵ��
3.�{(di��o)�����a���D(zhu��n)�S�c늙C(j��)�S������(du��)λ�ã�
4.��(j��ng)�^(gu��)�����{(di��o)����ʹ�@ʾ�Ć�Ȧ�^��(du��)λ��ֵ��ֽӽ�����(j��)늙C(j��)�ĘO��(du��)��(sh��)�������(l��i)��늙C(j��)-30��늽Ƕ�����(y��ng)��(du��)��(y��ng)�Ć�Ȧ�^��(du��)λ���c(di��n)���i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ��
5.��(l��i)��Ť�D(zhu��n)늙C(j��)�S�����ֺ���늙C(j��)�Sÿ�����ɻ؏�(f��)��ƽ��λ�Õr(sh��)����������λ���c(di��n)���ܜ�(zh��n)�_��(f��)�F(xi��n)���t��(du��)�R��Ч��
����Ñ��B�^��(du��)ֵ��Ϣ���o(w��)���@�ã���ô��ֻ�ܽ���ԭ�S�Č��ù��b��һ߅�z�y(c��)�^��(du��)λ�Ùz�y(c��)ֵ��һ߅�z�y(c��)늙C(j��)늽Ƕ���λ�����ù��b���{(di��o)�����a����늙C(j��)������(du��)��λ���P(gu��n)ϵ�������a����λ�c늙C(j��)늽Ƕ���λ���(du��)�R��Ȼ�����i�����@��һ��(l��i)���Ñ����ӟo(w��)�����н�Q���a������λ��(du��)�R��(w��n)�}�ˡ�
��(g��)�����]������EEPROM�д惦(ch��)��ʼ���bλ�õķ�������(ji��n)�Σ���(sh��)�ã��m��(y��ng)�Ժã��������Ñ��_(k��i)�ţ��Ա��Ñ����а��b���a���������늙C(j��)늽Ƕȵ���λ������
�����Ҿ��a������λ��(du��)�R��ʽ ��ͨ�������Ҿ��a���߂�һ��(du��)������sin��cos 1Vp-p��̖(h��o)���ஔ(d��ng)�ڷ�����̖(h��o)������ʽ���a����AB������̖(h��o)��ÿȦ��(hu��)�؏�(f��)�S�S�����(g��)��̖(h��o)���ڣ�����2048�ȣ��Լ�һ��(g��)խ���Č�(du��)�Q���Dz�Index��̖(h��o)���ஔ(d��ng)������ʽ���a����Z��̖(h��o)��һȦһ����F(xi��n)һ��(g��)���@�N�����Ҿ��a����(sh��)�|(zh��)��Ҳ��һ�N����ʽ���a������һ�N�����Ҿ��a�����˾߂�����������sin��cos��̖(h��o)�⣬߀�߂�һ��(du��)һȦֻ���F(xi��n)һ��(g��)��̖(h��o)���ڵ��������1Vp-p��������C��D��̖(h��o)�������C��̖(h��o)��sin���tD��̖(h��o)��cos��ͨ�^(gu��)sin��cos��̖(h��o)�ĸ߱��ʼ�(x��)�ּ��g(sh��)�����H����ʹ�����Ҿ��a���@�ñ�ԭʼ��̖(h��o)���ڸ��鼚(x��)�ܵ����x�z�y(c��)�ֱ��ʣ�����2048���������Ҿ��a����(j��ng)2048��(x��)�ֺͿ����_(d��)��ÿ�D(zhu��n)400���f(w��n)�������x�z�y(c��)�ֱ��ʣ���(d��ng)ǰ�ܶ��W���ŷ��S�Ҷ��ṩ�@߷ֱ��ʵ��ŷ�ϵ�y(t��ng)������(gu��)��(n��i)�S���в���Ҋ(ji��n)�����⎧C��D��̖(h��o)�������Ҿ��a����C��D��̖(h��o)��(j��ng)�^(gu��)��(x��)�ֺ�߀�����ṩ�^�ߵ�ÿ�D(zhu��n)�^��(du��)λ����Ϣ������ÿ�D(zhu��n)2048��(g��)�^��(du��)λ�ã���ˎ�C��D��̖(h��o)�������Ҿ��a������ҕ��һ�Nģ�Mʽ�Ć�Ȧ�^��(du��)���a����
�����@�N���a�����ŷ�늙C(j��)�ij�ʼ늽Ƕ���λ��(du��)�R��ʽ���£�
1.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
2.��ʾ�����^�������Ҿ��a����C��̖(h��o)���Σ�
3.�{(di��o)�����a���D(zhu��n)�S�c늙C(j��)�S������(du��)λ�ã�
4.һ߅�{(di��o)����һ߅�^��C��̖(h��o)���Σ�ֱ���ɵ͵��ߵ��^(gu��)���c(di��n)��(zh��n)�_���F(xi��n)��늙C(j��)�S�Ķ���ƽ��λ��̎���i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ��
5.��(l��i)��Ť�D(zhu��n)늙C(j��)�S�����ֺ���늙C(j��)�Sÿ�����ɻ؏�(f��)��ƽ��λ�Õr(sh��)���^(gu��)���c(di��n)���ܜ�(zh��n)�_��(f��)�F(xi��n)���t��(du��)�R��Ч��
����ֱ���Դ���(y��n)�C���£�
1.��ʾ�����^�쾎�a����C����̖(h��o)��늙C(j��)��UV����늄�(sh��)���Σ�
2.�D(zhu��n)��(d��ng)늙C(j��)�S�����a����C����̖(h��o)�ɵ͵��ߵ��^(gu��)���c(di��n)�c늙C(j��)��UV����늄�(sh��)�����ɵ͵��ߵ��^(gu��)���c(di��n)�غϡ�
�@�N�(y��n)�C������Ҳ����������(du��)�R������
�˕r(sh��)C��̖(h��o)���^(gu��)���c(di��n)�c늙C(j��)늽Ƕ���λ��-30���c(di��n)��(du��)�R��
�����ֱ�Ӻ�늙C(j��)늽Ƕȵ�0���c(di��n)��(du��)�R�����Կ��]��
1.��3��(g��)��ֵ��ȵ����ӳ����ͣ�Ȼ�������B�ӵ�3��(g��)���քe����늙C(j��)��UVW�����@�M������
2.��ʾ�����^��늙C(j��)U��ݔ���c�����������c(di��n)���Ϳ��Խ��Ƶõ�늙C(j��)��U�෴늄�(sh��)���Σ�
3.�{(di��o)�����a���D(zhu��n)�S�c늙C(j��)�S������(du��)λ�ã�
4.һ߅�{(di��o)����һ߅�^�쾎�a����C����̖(h��o)�ɵ͵��ߵ��^(gu��)���c(di��n)��늙C(j��)U�෴늄�(sh��)�����ɵ͵��ߵ��^(gu��)���c(di��n)����Kʹ2��(g��)�^(gu��)���c(di��n)�غϣ��i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ����Ɍ�(du��)�R��
������ͨ�����Ҿ��a�����߂�һȦ֮��(n��i)����λ��Ϣ����Index��̖(h��o)Ҳֻ�ܷ�ӳһȦ��(n��i)��һ��(g��)�c(di��n)λ�����߂�ֱ�ӵ���λ��(du��)�R����������ڴ�Ҳ������ӑՓ��Ԓ�}��
����ɽ��������Ҿ��a�����ŷ��(q��)��(d��ng)���܉�?y��n)��Ñ��ṩ��C��D�Ы@ȡ�Ć�Ȧ�^��(du��)λ����Ϣ���t���Կ��]��
1.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
2.�����ŷ��(q��)��(d��ng)���xȡ���@ʾ��C��D��̖(h��o)�Ы@ȡ�Ć�Ȧ�^��(du��)λ����Ϣ��
3.�{(di��o)����׃�S�c늙C(j��)�S������(du��)λ�ã�
4.��(j��ng)�^(gu��)�����{(di��o)����ʹ�@ʾ�Ľ^��(du��)λ��ֵ��ֽӽ�����(j��)늙C(j��)�ĘO��(du��)��(sh��)�������(l��i)��늙C(j��)-30��늽Ƕ�����(y��ng)��(du��)��(y��ng)�Ľ^��(du��)λ���c(di��n)���i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ��
5.��(l��i)��Ť�D(zhu��n)늙C(j��)�S�����ֺ���늙C(j��)�Sÿ�����ɻ؏�(f��)��ƽ��λ�Õr(sh��)����������^��(du��)λ���c(di��n)���ܜ�(zh��n)�_��(f��)�F(xi��n)���t��(du��)�R��Ч��
�˺�����ڳ���ֱ���Դ�õ��cǰ�������ͬ�Č�(du��)�R�(y��n)�CЧ����
1.��ʾ�����^�������Ҿ��a����C����̖(h��o)��늙C(j��)��UV����늄�(sh��)���Σ�
2.�D(zhu��n)��(d��ng)늙C(j��)�S���(y��n)�C���a����C����̖(h��o)�ɵ͵��ߵ��^(gu��)���c(di��n)�c늙C(j��)��UV����늄�(sh��)�����ɵ͵��ߵ��^(gu��)���c(di��n)�غϡ�
��������(q��)��(d��ng)����(n��i)����EEPROM�ȷ���ʧ�Դ惦(ch��)����Ҳ���Դ惦(ch��)�����Ҿ��a���S�C(j��)���b��늙C(j��)�S�Ϻ�(sh��)�y(c��)����λ�����w�������£�
1.���������S�C(j��)���b��늙C(j��)�ϣ����̽Y(ji��)���a���D(zhu��n)�S�c늙C(j��)�S���Լ����a���⚤�c늙C(j��)�⚤��
2.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
3.���ŷ��(q��)��(d��ng)���xȡ��C��D��̖(h��o)��������(l��i)�Ć�Ȧ�^��(du��)λ��ֵ���������(q��)��(d��ng)����(n��i)��ӛ�늙C(j��)늽Ƕȳ�ʼ���b��λ��EEPROM�ȷ���ʧ�Դ惦(ch��)���У�
4.��(du��)�R�^(gu��)�̽Y(ji��)����
���ڴ˕r(sh��)늙C(j��)�S�Ѷ�����늽Ƕ���λ��-30�ȷ�����˴�����(q��)��(d��ng)����(n��i)��EEPROM�ȷ���ʧ�Դ惦(ch��)���е�λ�Ùz�y(c��)ֵ�͌�(du��)��(y��ng)늙C(j��)늽Ƕȵ�-30����λ���˺��(q��)��(d��ng)��������r(sh��)���ɾ��a����������(l��i)���c늽Ƕ����P(gu��n)�Ć�Ȧ�^��(du��)λ��ֵ�c�@��(g��)�惦(ch��)ֵ���������(j��)늙C(j��)�O��(du��)��(sh��)�M(j��n)�б�Ҫ�ēQ�㣬�ټ���-30�ȣ��Ϳ��Եõ�ԓ�r(sh��)�̵�늙C(j��)늽Ƕ���λ��
�@�N��(du��)�R��ʽ��Ҫ�ŷ��(q��)��(d��ng)�����ڇ�(gu��)��(n��i)�Ͳ���������֧�ֺ���Ϸ��܌�(sh��)�F(xi��n)����������ӛ�늙C(j��)늽Ƕȳ�ʼ��λ��EEPROM�ȷ���ʧ�Դ惦(ch��)��λ���ŷ��(q��)��(d��ng)���У����һ����(du��)�R��늙C(j��)�ͺ��(q��)��(d��ng)����(sh��)�Ͻ����ˣ������Ҫ���Q늙C(j��)�������Ҿ��a���������(q��)��(d��ng)��������Ҫ�����M(j��n)�г�ʼ���b��λ�Č�(du��)�R�����������½���늙C(j��)���(q��)��(d��ng)���������P(gu��n)ϵ��
���D(zhu��n)׃��������λ��(du��)�R��ʽ ���D(zhu��n)׃������(ji��n)�Q��׃�����ɽ�(j��ng)�^(gu��)����늴��O(sh��)Ӌ(j��)�ĸ����ܹ�䓯BƬ���������(g��u)�ɵģ�����ڲ��ù�늼��g(sh��)�ľ��a�����ԣ������͟ᣬ�����͛_���������ۣ��������g�Ȑ��ӹ����h(hu��n)�����m��(y��ng)���������������ϵ�y(t��ng)�ȹ��r���ӵđ�(y��ng)�ÏV�����ã�һ��(du��)�O�����٣�����׃����ҕ��һ�N��Ȧ�^��(du��)ʽ����ϵ�y(t��ng)����(y��ng)��Ҳ���V��������ڴ˃H�Ԇ�����׃?y��u)�ӑՓ�?du��)������׃�c�ŷ�늙C(j��)���ף���(g��)���J(r��n)����O��(du��)��(sh��)��ò���늙C(j��)�O��(du��)��(sh��)�ļs��(sh��)��һ����늙C(j��)�ȵČ�(du��)��(y��ng)�͘O��(du��)��(sh��)�ֽ⡣
��׃����̖(h��o)����һ���6�����֞�3�M���քe��(du��)��(y��ng)һ��(g��)����(l��)��Ȧ����2��(g��)�����ĸБ�(y��ng)��Ȧ������(l��)��Ȧ����ݔ��������ͼ���(l��)��̖(h��o)���Б�(y��ng)��Ȧ����(j��)��׃�D(zhu��n)���ӵ����λ���P(gu��n)ϵ���Б�(y��ng)����(l��i)����SIN��COS���j(lu��)�ęz�y(c��)��̖(h��o)����׃SIN��COSݔ����̖(h��o)�Ǹ���(j��)�D(zhu��n)����֮�g�ĽǶȌ�(du��)����(l��)������̖(h��o)���{(di��o)�ƽY(ji��)�����������(l��)��̖(h��o)��sin��t���D(zhu��n)����֮�g�ĽǶȞ�ȣ��tSIN��̖(h��o)��sin��t��sin�ȣ��tCOS��̖(h��o)��sin��t��cos�ȣ�����(j��)SIN��COS��̖(h��o)��ԭʼ�ļ���(l��)��̖(h��o)��ͨ�^(gu��)��Ҫ�ęz�y(c��)�·���Ϳ��ԫ@���^�߷ֱ��ʵ�λ�Ùz�y(c��)�Y(ji��)����Ŀǰ������׃ϵ�y(t��ng)�ęz�y(c��)�ֱ��ʿ����_(d��)��ÿȦ2��12�η�����4096�����ƌW(xu��)�о��ͺ��պ���ϵ�y(t��ng)���������_(d��)��2��20�η����ϣ����^(gu��)�w�e�ͳɱ�Ҳ���dz����^��
������׃�c�ŷ�늙C(j��)늽Ƕ���λ�Č�(du��)�R�������£�
1.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V����
2.Ȼ����ʾ�����^����׃��SIN��Ȧ����̖(h��o)����ݔ����
3.����(j��)�����ķ���̶ȣ��{(di��o)��늙C(j��)�S�ϵ���׃�D(zhu��n)���c늙C(j��)�S������(du��)λ�ã�������׃�����c늙C(j��)�⚤������(du��)λ�ã�
4.һ߅�{(di��o)����һ߅�^����׃SIN��̖(h��o)�İ��j(lu��)��һֱ�{(di��o)������̖(h��o)���j(lu��)�ķ�ֵ��ȫ�w�㣬�i����׃��
5.��(l��i)��Ť�D(zhu��n)늙C(j��)�S�����ֺ���늙C(j��)�Sÿ�����ɻ؏�(f��)��ƽ��λ�Õr(sh��)����̖(h��o)���j(lu��)�ķ�ֵ�^(gu��)���c(di��n)���ܜ�(zh��n)�_��(f��)�F(xi��n)���t��(du��)�R��Ч ��
����ֱ���Դ���M(j��n)�Ќ�(du��)�R�(y��n)�C��
1.��ʾ�����^����׃��SIN��̖(h��o)��늙C(j��)��UV����늄�(sh��)���Σ�
2.�D(zhu��n)��(d��ng)늙C(j��)�S���(y��n)�C��׃��SIN��̖(h��o)���j(lu��)�^(gu��)���c(di��n)�c늙C(j��)��UV����늄�(sh��)�����ɵ͵��ߵ��^(gu��)���c(di��n)�غϡ�
�@��(g��)�(y��n)�C������Ҳ����������(du��)�R������
�˕r(sh��)SIN��̖(h��o)���j(lu��)���^(gu��)���c(di��n)�c늙C(j��)늽Ƕ���λ��-30���c(di��n)��(du��)�R��
�����ֱ�Ӻ�늙C(j��)늽Ƕȵ�0���c(di��n)��(du��)�R�����Կ��]��
1.��3��(g��)��ֵ��ȵ����ӳ����ͣ�Ȼ�������B�ӵ�3��(g��)���քe����늙C(j��)��UVW�����@�M������
2.��ʾ�����^��늙C(j��)U��ݔ���c�����������c(di��n)���Ϳ��Խ��Ƶõ�늙C(j��)��U�෴늄�(sh��)���Σ�
3.����(j��)�����ķ���̶ȣ��{(di��o)�����a���D(zhu��n)�S�c늙C(j��)�S������(du��)λ�ã����߾��a���⚤�c늙C(j��)�⚤������(du��)λ�ã�
4.һ߅�{(di��o)����һ߅�^����׃��SIN��̖(h��o)���j(lu��)���^(gu��)���c(di��n)��늙C(j��)U�෴늄�(sh��)�����ɵ͵��ߵ��^(gu��)���c(di��n)����Kʹ�@2��(g��)�^(gu��)���c(di��n)�غϣ��i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ����Ɍ�(du��)�R��
��Ҫָ�����ǣ�����������������Ч�^(q��)����׃��SIN���j(lu��)��̖(h��o)�е������ܺ�ؓ(f��)���ܡ�����SIN��̖(h��o)�����D(zhu��n)����֮�g�ĽǶȞ�ȵ�sin��ֵ��(du��)����(l��)��̖(h��o)���{(di��o)�ƽY(ji��)��������csin�ȵ������܌�(du��)��(y��ng)��SIN��̖(h��o)���j(lu��)�У����{(di��o)�Ƶļ���(l��)��̖(h��o)�cԭʼ����(l��)��̖(h��o)ͬ�࣬���csin�ȵ�ؓ(f��)���܌�(du��)��(y��ng)��SIN��̖(h��o)���j(lu��)�У����{(di��o)�Ƶļ���(l��)��̖(h��o)�cԭʼ����(l��)��̖(h��o)���࣬��(j��)�˿��ԅ^(q��)�e�Д���׃ݔ����SIN���j(lu��)��̖(h��o)�����е������ܺ�ؓ(f��)���ܣ���(du��)�R�r(sh��)����Ҫȡsin����ؓ(f��)�������������^(gu��)���c(di��n)��(du��)��(y��ng)��SIN���j(lu��)��̖(h��o)���^(gu��)���c(di��n)�����ȡ���ˣ�����δ�Ӝ�(zh��n)�_�Д��Ԓ����(du��)�R���늽Ƕ��п����e(cu��)λ180�ȣ��Ķ��п�������ٶ���h(hu��n)�M(j��n)����������
����ɽ�����׃���ŷ��(q��)��(d��ng)���܉�?y��n)��Ñ��ṩ����׃���?h��o)�Ы@ȡ���c늙C(j��)늽Ƕ����P(gu��n)�Ľ^��(du��)λ����Ϣ���t���Կ��]��
1.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
2.�����ŷ��(q��)��(d��ng)���xȡ���@ʾ����׃��̖(h��o)�Ы@ȡ���c늙C(j��)늽Ƕ����P(gu��n)�Ľ^��(du��)λ����Ϣ��
3.����(j��)�����ķ���̶ȣ��{(di��o)����׃�S�c늙C(j��)�S������(du��)λ�ã�������׃�⚤�c늙C(j��)�⚤������(du��)λ�ã�
4.��(j��ng)�^(gu��)�����{(di��o)����ʹ�@ʾ�Ľ^��(du��)λ��ֵ��ֽӽ�����(j��)늙C(j��)�ĘO��(du��)��(sh��)�������(l��i)��늙C(j��)-30��늽Ƕ�����(y��ng)��(du��)��(y��ng)�Ľ^��(du��)λ���c(di��n)���i�����a���c늙C(j��)������(du��)λ���P(gu��n)ϵ��
5.��(l��i)��Ť�D(zhu��n)늙C(j��)�S�����ֺ���늙C(j��)�Sÿ�����ɻ؏�(f��)��ƽ��λ�Õr(sh��)����������^��(du��)λ���c(di��n)���ܜ�(zh��n)�_��(f��)�F(xi��n)���t��(du��)�R��Ч��
�˺�����ڳ���ֱ���Դ�õ��cǰ�������ͬ�Č�(du��)�R�(y��n)�CЧ����
1.��ʾ�����^����׃��SIN��̖(h��o)��늙C(j��)��UV����늄�(sh��)���Σ�
2.�D(zhu��n)��(d��ng)늙C(j��)�S���(y��n)�C��׃��SIN��̖(h��o)���j(lu��)�^(gu��)���c(di��n)�c늙C(j��)��UV����늄�(sh��)�����ɵ͵��ߵ��^(gu��)���c(di��n)�غϡ�
��������(q��)��(d��ng)����(n��i)����EEPROM�ȷ���ʧ�Դ惦(ch��)����Ҳ���Դ惦(ch��)��׃�S�C(j��)���b��늙C(j��)�S�Ϻ�(sh��)�y(c��)����λ�����w�������£�
1.����׃�S�C(j��)���b��늙C(j��)�ϣ����̽Y(ji��)��׃�D(zhu��n)�S�c늙C(j��)�S���Լ���׃�⚤�c늙C(j��)�⚤��
2.��һ��(g��)ֱ���Դ�o늙C(j��)��UV�@�Mͨ��С���~�������ֱ��늣�U�룬V������늙C(j��)�S������һ��(g��)ƽ��λ�ã�
3.���ŷ��(q��)��(d��ng)���xȡ����׃��������(l��i)���c늽Ƕ����P(gu��n)�Ľ^��(du��)λ��ֵ���������(q��)��(d��ng)����(n��i)��ӛ�늙C(j��)늽Ƕȳ�ʼ���b��λ��EEPROM�ȷ���ʧ�Դ惦(ch��)���У�
4.��(du��)�R�^(gu��)�̽Y(ji��)����
���ڴ˕r(sh��)늙C(j��)�S�Ѷ�����늽Ƕ���λ��-30�ȷ�����˴�����(q��)��(d��ng)����(n��i)��EEPROM�ȷ���ʧ�Դ惦(ch��)���е�λ�Ùz�y(c��)ֵ�͌�(du��)��(y��ng)늙C(j��)늽Ƕȵ�-30����λ���˺��(q��)��(d��ng)��������r(sh��)������׃��������(l��i)���c늽Ƕ����P(gu��n)�Ľ^��(du��)λ��ֵ�c�@��(g��)�惦(ch��)ֵ���������(j��)늙C(j��)�O��(du��)��(sh��)�M(j��n)�б�Ҫ�ēQ�㣬�ټ���-30�ȣ��Ϳ��Եõ�ԓ�r(sh��)�̵�늙C(j��)늽Ƕ���λ��
�@�N��(du��)�R��ʽ��Ҫ�ŷ��(q��)��(d��ng)�����ڇ�(gu��)��(n��i)�Ͳ���������֧�ֺ���Ϸ��܌�(sh��)�F(xi��n)����������ӛ�늙C(j��)늽Ƕȳ�ʼ��λ��EEPROM�ȷ���ʧ�Դ惦(ch��)��λ���ŷ��(q��)��(d��ng)���У����һ����(du��)�R��늙C(j��)�ͺ��(q��)��(d��ng)����(sh��)�Ͻ����ˣ������Ҫ���Q늙C(j��)����׃�������(q��)��(d��ng)��������Ҫ�����M(j��n)�г�ʼ���b��λ�Č�(du��)�R�����������½���늙C(j��)���(q��)��(d��ng)���������P(gu��n)ϵ��
ע��
1.����ӑՓ�У����^��(du��)�R��늙C(j��)늽Ƕȵ�-30����λ���ᷨ������UV��늄�(sh��)���Μ�����U��30�ȵ�ǰ���l����
2.����ӑՓ�У�����UV��ͨ늣�������UV����늄�(sh��)���Ξ�������Щ�ŷ�ϵ�y(t��ng)�Č�(du��)�R��ʽ���ܕ�(hu��)����UW��ͨ늲�����UW����늄�(sh��)���Ρ�
3.�����ֱ�ӌ�(du��)�R��늙C(j��)늽Ƕ�0����λ�c(di��n)��Ҳ���Ԍ�U�����͉�ֱ��Դ�����O����V���W�ಢ(li��n)�����ֱ��Դ��ؓ(f��)�ˣ��˕r(sh��)늙C(j��)�S�Ķ��������(du��)��UV�മ(li��n)ͨ늵ķ�ʽ��(hu��)ƫ��30�ȣ������нo��������(y��ng)��(du��)�R������(du��)�R��ԭ�t�ό���(du��)�R��늙C(j��)늽Ƕȵ�0����λ����������-30�ȵ�ƫ�������@���������к�̎�����ǿ��]늙C(j��)�@�M�ą���(sh��)��һ���ԣ�V���W�ಢ(li��n)�քe����(j��ng)V���W���@�M������ܿ��ܲ���һ�£��Ķ���(hu��)Ӱ�늙C(j��)�S����ǶȵĜ�(zh��n)�_�ԡ�����UV��ͨ늕r(sh��)��U���V���@�M��μ��Ĵ�(li��n)�P(gu��n)ϵ���������(j��ng)U���V���@�M�������Ȼ��һ�µģ�늙C(j��)�S����ǶȵĜ�(zh��n)�_�Բ���(hu��)�ܵ��@�M���������Ӱ푡�
4.���ų��ŷ��S�����⌢��ʼ��λ�e(cu��)λ��(du��)�R�Ŀ����ԣ��������ڿ����ṩ�^��(du��)λ�Ô�(sh��)��(j��)�ķ���ϵ�y(t��ng)�У���ʼ��λ���e(cu��)λ��(du��)�R�������ױ���(sh��)��(j��)��ƫ�����a(b��)����(l��i)���Դ˷N��ʽҲ�S������ij�N���o(h��)�Լ��a(ch��n)Ʒ�������á�ֻ���@��һ��(l��i)���Ñ����ӟo(w��)��֪���ŷ�늙C(j��)����Ԫ���ij�ʼ��λ����ԓ��(du��)�R���ă��ˡ��Ñ���ȻҲ��Ը�������@�ӵĹ���(y��ng)�̡�
늽Ƕ���λ��(du��)�R�Ļ����������Y(ji��) 1.�����^�취
�m���ڎ��Q����̖(h��o)������ʽ���a���������Ҿ��a�����D(zhu��n)׃������
1) ��ʾ����ֱ���^��UV����늄�(sh��)�����^(gu��)���c(di��n)�c��������U����̖(h��o)������/Z��̖(h��o)����Sin��̖(h��o)�^(gu��)���c(di��n)����Sin���j(lu��)��̖(h��o)�^(gu��)���c(di��n)����λ��(du��)�R�P(gu��n)ϵ���Դ˷������Ԍ���������������̖(h��o)߅�ػ��^(gu��)���c(di��n)��(du��)�R��-30��늽Ƕ���λ��
2) ����ֵ�����m��(d��ng)?sh��)�����(g��)��ֵ��蘋(g��u)�����Σ����������ŷ�늙C(j��)��UVW��(d��ng)��������ʾ�����^��U����(d��ng)�����c���ε�ֵ���������c(di��n)֮�g��̓�MU�෴늄�(sh��)�����c�c��������U����̖(h��o)������/Z��̖(h��o)����Sin��̖(h��o)�^(gu��)���c(di��n)����Sin���j(lu��)��̖(h��o)�^(gu��)���c(di��n)����λ��(du��)�R�P(gu��n)ϵ���Դ˷������Ԍ���������������̖(h��o)߅�ػ��^(gu��)���c(di��n)��(du��)�R��늽Ƕ���λ0�c(di��n)��
2.�D(zhu��n)�Ӷ���
�m���ڎ��Q����̖(h��o)������ʽ���a���������Ҿ��a�����D(zhu��n)׃�����IJ��Ό�(du��)�R�����߽^��(du��)ʽ���a���������Ҿ��a�����D(zhu��n)׃�����Ȱ����ṩ��Ȧ�^��(du��)λ�Ô�(sh��)ֵ��Ϣ��(du��)�R��
1) ��U�����͉�ֱ��Դ�����O��V�����ֱ��Դ��ؓ(f��)�ˣ�����늙C(j��)�S
�˺�һ߅�{(di��o)���������c늙C(j��)������(du��)λ���P(gu��n)ϵ��һ߅��ʾ�����^���������̖(h��o)��ֱ��U����̖(h��o)������/Z��̖(h��o)����Sin��̖(h��o)�^(gu��)���c(di��n)����Sin���j(lu��)��̖(h��o)�^(gu��)���c(di��n)��(zh��n)�_��(f��)�F(xi��n)���Դ˷������Ԍ���������������̖(h��o)߅�ػ��^(gu��)���c(di��n)��(du��)�R�� -30��늽Ƕ���λ��
Ҳ����һ߅�{(di��o)���������c늙C(j��)������(du��)λ���P(gu��n)ϵ��һ߅�O(sh��)���^���Ȧ�^��(du��)λ�õĔ�(sh��)ֵ��Ϣ��ֱ����(sh��)��(j��)��λ��(zh��n)�_��(f��)�F(xi��n)���Դ˷���Ҳ���Ԍ��������Ć�Ȧ�^��(du��)λ�����c(di��n)��(du��)�R�� -30��늽Ƕ���λ��
������ȹ���� -30��늽ǶȌ�(du��)��(y��ng)�Ć�Ȧ�^��(du��)λ�õĔ�(sh��)ֵ��߀�����{(di��o)���������c늙C(j��)������(du��)λ���P(gu��n)ϵ��ֱ��ԓ��(sh��)ֵ��(zh��n)�_��(f��)�F(xi��n)���Ϳ��Ԍ���Ȧ�^��(du��)λ�����c(di��n)ֱ�ӌ�(du��)�R��늽Ƕ���λ0�c(di��n)��ԓ�������ܱȌ�����һ�� 2) �п��Y(ji��)�ĺ�һ�l�������_�ȸ���һЩ����
��(d��ng)ȻҲ��ȫ���Բ��{(di��o)���������c늙C(j��)������(du��)λ���P(gu��n)ϵ�����Ǻ�(ji��n)�ε��S�C(j��)���b���a�������xȡ���Ć�Ȧ�^��(du��)λ����Ϣ�����ʼ���b��ƫ��ֵ��ͨ�^(gu��)���m(x��)�\(y��n)�㣬��(sh��)�F(xi��n)��Ȧ�^��(du��)λ����Ϣ��늽Ƕ���λ���c(di��n)��߉��(du��)�R��ԓ�������˹�����Ҫ����͡�
2) ��U�����͉�ֱ��Դ�����O����V���W�ಢ(li��n)�����ֱ��Դ��ؓ(f��)�ˣ�����늙C(j��)�S
�˺�һ߅�{(di��o)���������c늙C(j��)������(du��)λ���P(gu��n)ϵ��һ߅��ʾ�����^���������̖(h��o)��ֱ��U����̖(h��o)������/Z��̖(h��o)����Sin��̖(h��o)�^(gu��)���c(di��n)����Sin���j(lu��)��̖(h��o)�^(gu��)���c(di��n)��(zh��n)�_��(f��)�F(xi��n)���Դ˷������Ԍ���������������̖(h��o)߅�ػ��^(gu��)���c(di��n)��(du��)�R��늽Ƕ���λ0�c(di��n)��
Ҳ����һ߅�{(di��o)���������c늙C(j��)������(du��)λ���P(gu��n)ϵ��һ߅�O(sh��)���^���Ȧ�^��(du��)λ�õĔ�(sh��)ֵ��Ϣ��ֱ����(sh��)��(j��)��λ��(zh��n)�_��(f��)�F(xi��n)���Դ˷���Ҳ���Ԍ���������������̖(h��o)߅�ػ��^(gu��)���c(di��n)��(du��)�R��늽Ƕ���λ0�c(di��n)��
[ ���������J��2009-01-31 19:30���¾� ]
 �����W(w��ng)����31010802001143̖(h��o)
�����W(w��ng)����31010802001143̖(h��o)

